I have raspberry pi 4 with raspbian os lite installed and the OS is directly installed on SSD which is connected with USB3.0 with connector USB-to-SATA. Whenever the power outage happens the pi some time boots and sometime it doesn’t and it also takes lots of time to boot 10min+
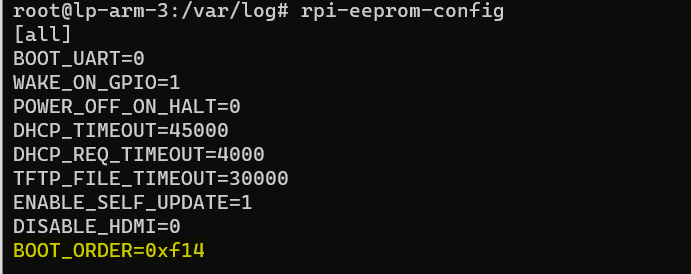
- First I checked with below command what services are taking longer time and disabled docker and kubelet rpi-eeprom-update
root@lp-arm-3:~# systemd-analyze blame
1min 36.522s docker.service
51.427s containerd.service
50.609s rpi-eeprom-update.service
50.590s user@1000.service
50.221s ModemManager.service
49.702s NetworkManager-wait-online.service
38.108s apt-daily-upgrade.service
32.277s dpkg-db-backup.service
2.558s dev-sda2.device
1.281s raspi-config.service
670ms man-db.service
613ms NetworkManager.service
583ms keyboard-setup.service
536ms systemd-logind.service
512ms systemd-udev-trigger.service
429ms systemd-journald.service
root@lp-arm-3:~# systemd-analyze
Startup finished in 36.419s (kernel) + 2min 33.375s (userspace) = 3min 9.794s
multi-user.target reached after 2min 33.318s in userspace.
root@lp-arm-3:~# systemd-analyze critical-chain
The time when unit became active or started is printed after the "@" character.
The time the unit took to start is printed after the "+" character.
multi-user.target @2min 33.318s
└─kubelet.service @1min 6.646s
└─network-online.target @55.038s
└─NetworkManager-wait-online.service @5.315s +49.702s
└─NetworkManager.service @4.687s +613ms
└─dbus.service @4.552s +97ms
└─basic.target @4.509s
└─sockets.target @4.509s
└─docker.socket @4.485s +23ms
└─sysinit.target @4.468s
└─systemd-timesyncd.service @4.091s +375ms
└─systemd-tmpfiles-setup.service @3.805s +208ms
└─local-fs.target @3.777s
└─run-user-1000.mount @5.576s
└─local-fs-pre.target @1.650s
└─keyboard-setup.service @1.065s +583ms
└─systemd-journald.socket @1.019s
└─-.mount @946ms
└─-.slice @946ms- This did not fix issue.
- Main issue was USB SATA driver speed.
- I enabled permanent logs for boot
journalctl --list-boots
journalctl -b -1
show only error
journalctl -b -1 -p err
Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#9 uas_eh_abort_handler 0 uas-tag 15 inflight: CMD OUT Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#9 CDB: opcode=0x2a 2a 00 01 50 21 78 00 00 08 00 Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#4 uas_eh_abort_handler 0 uas-tag 6 inflight: CMD Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#4 CDB: opcode=0x35 35 00 00 00 00 00 00 00 00 00 Feb 07 20:40:53 lp-arm-3.home kernel: scsi host0: uas_eh_device_reset_handler start Feb 07 20:40:53 lp-arm-3.home kernel: usb 2-2: reset SuperSpeed USB device number 2 using xhci_hcd Feb 07 20:40:53 lp-arm-3.home kernel: scsi host0: uas_eh_device_reset_handler success Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#8 UNKNOWN(0x2003) Result: hostbyte=0x07 driverbyte=DRIVER_OK cmd_age=61s Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#8 CDB: opcode=0x28 28 00 00 5e dc f8 00 00 10 00 Feb 07 20:40:53 lp-arm-3.home kernel: I/O error, dev sda, sector 6216952 op 0x0:(READ) flags 0x80700 phys_seg 2 prio class 2 Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#2 UNKNOWN(0x2003) Result: hostbyte=0x07 driverbyte=DRIVER_OK cmd_age=61s Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#2 CDB: opcode=0x28 28 00 02 88 f5 e0 00 00 30 00 Feb 07 20:40:53 lp-arm-3.home kernel: I/O error, dev sda, sector 42530272 op 0x0:(READ) flags 0x80700 phys_seg 6 prio class 2 Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#1 UNKNOWN(0x2003) Result: hostbyte=0x07 driverbyte=DRIVER_OK cmd_age=61s Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#1 CDB: opcode=0x28 28 00 00 5e cb c8 00 01 00 00 Feb 07 20:40:53 lp-arm-3.home kernel: I/O error, dev sda, sector 6212552 op 0x0:(READ) flags 0x80700 phys_seg 32 prio class 2 Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#3 UNKNOWN(0x2003) Result: hostbyte=0x07 driverbyte=DRIVER_OK cmd_age=61s Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#3 CDB: opcode=0x28 28 00 02 84 ee 68 00 00 50 00 Feb 07 20:40:53 lp-arm-3.home kernel: I/O error, dev sda, sector 42266216 op 0x0:(READ) flags 0x80700 phys_seg 10 prio class 2 Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#6 UNKNOWN(0x2003) Result: hostbyte=0x07 driverbyte=DRIVER_OK cmd_age=55s Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#6 CDB: opcode=0x28 28 00 02 80 6e 38 00 00 90 00 Feb 07 20:40:53 lp-arm-3.home kernel: I/O error, dev sda, sector 41971256 op 0x0:(READ) flags 0x80700 phys_seg 18 prio class 2 Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#7 UNKNOWN(0x2003) Result: hostbyte=0x07 driverbyte=DRIVER_OK cmd_age=49s Feb 07 20:40:53 lp-arm-3.home kernel: sd 0:0:0:0: [sda] tag#7 CDB: opcode=0x28 28 00 02 80 3c d0 00 00 58 00 Feb 07 20:40:53 lp-arm-3.home kernel: I/O error, dev sda, sector 41958608 op 0x0:(READ) flags 0x80700 phys_seg 11 prio class 2- The kernel is resetting the USB
- Disabled UAS for SSD – fixed the issue
lsusb
#get the USB ID eg 7825:a2a4
vi /boot/firmware/cmdline.txt
append this line at the end
usb-storage.quirks=7825:a2a4:u
reboot
root@lp-arm-3:~# lsusb -t
/: Bus 02.Port 1: Dev 1, Class=root_hub, Driver=xhci_hcd/4p, 5000M
|__ Port 2: Dev 2, If 0, Class=Mass Storage, Driver=usb-storage, 5000M
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=xhci_hcd/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/4p, 480M
usb-storage (BOT):
sends one command at a time
waits for completion
has simpler recovery
tolerates retries and delays